

대표 사진(날개를 빠르게 펴고 안정적으로 비행할 수 있는 무당벌레)
서울대 공대는 국방생체모방 자율로봇 특화센터 조규진(기계공학부) 교수팀 (1저자: 백상민 연구원, 공동저자: 임소정, 채수환 연구원, 이대영 박사 후 과정(하버드), 교신저자: 조규진 교수, 디자이너: 송정률 연구원)이 무당벌레를 모사한 종이접기 기반 구조와 이를 활용한 로봇을 개발했다고 16일 밝혔다. 이번 연구는 생체모방을 통해 종이접기 기반 구조의 실제 활용 가능성을 한 단계 끌어올린 성과로 평가받고 있다.
종이접기 기반 구조는 가볍고 좁은 공간에 접혀 있을 수 있어 다양한 분야에 적용되고 있다. 하지만 기존의 종이접기 구조 설계 방식은 탄성 에너지 저장과 큰 힘을 지탱하는 능력에 있어서 한계가 있었다.
이에 연구진은 무당벌레의 시맥에서 영감을 받아 종이접기 구조의 면에 탄성과 곡률을 부여했다. 연구진이 착안한 무당벌레는 복잡하게 접혀있는 날개를 0.1초 이내에 빠르게 펼 수 있고 100Hz의 매우 빠른 날갯짓에서도 날개가 꺾이지 않는다. 그 이유는 시맥의 단면 형상이 독특하고 또 탄성을 활용하기 때문이다. 연구진은 이 원리를 종이접기 기반 구조에 적용했다.
그 결과 개발된 무당벌레 모사 종이접기 구조는 납작하게 접힐 수 있지만 탄성 에너지 저장 능력이 높아 스스로 빠르게 펴지고 펴진 뒤에는 큰 힘을 견딜 수 있다.
서울대 조규진 교수는 “무당벌레의 시맥의 탄성과 단면 형상을 종이접기 구조에 적용해 에너지 저장량을 크게 높일 수 있고, 동시에 추가 요소 없이 큰 힘을 견딜 수 있게 했다”라고 설명했다.
연구진은 나아가 종이접기 구조 기반의 전개형 날개를 활용해 점핑-글라이딩이 가능한 복합거동 로봇을 개발했다. 이 날개는 전체 면적의 1/8의 면적에 접힐 수 있고 원할 때 빠르게 펼 수 있다. 로봇은 날개가 접힌 상태에서 점핑을 한 뒤 최고점에서 빠르게 날개를 펴 글라이딩한다.
이처럼 점핑과 연속된 글라이딩으로 로봇은 안정적으로 더욱 먼 거리를 이동할 수 있다. 또한 연구진은 생체모방 종이접기 구조를 활용해 전개형 날갯짓 메커니즘, 크롤링-글라이딩 로봇, 점핑로봇 등을 개발했다.
서울대 조규진 교수는 ”이번 연구는 무당벌레의 원리를 활용한 전개형 메커니즘에 특화된 스프링 요소를 개발한 데 의의가 있다“라며, ”무당벌레 모사 종이접기 구조는 소형탐사로봇, 의료 로봇, 항공 우주 기술 등에 쉽게 적용할 수 있고 전개형 메커니즘의 기능을 확장하는 데 큰 도움이 될 것”이라고 말했다.
한편 이번 연구 성과는 로봇분야 국제학술지 ‘사이언스 로보틱스’ 표지논문으로 4월 15일자에 게재 될 예정이다.
본 연구는 국방생체모방 자율로봇 특화연구센터를 통한 방위사업청과 국방과학연구소 연구비 지원과 KIST 주요사업의 지원을 받아 수행됐다.
- ■동영상: https://youtu.be/AD4ux8qNeEg
- ■논문: https://www.dropbox.com/s/vdcocm3iyvtlj8s/%5BManuscript%5D%20aaz6262_ArticleContent_v2.pdf?dl=0
- ■사진: https://www.dropbox.com/sh/afawr3m3smxkukm/AABHur8axtqWlsXA3E6ymoXBa?dl=0
- ■논문 영상 및 무자막 영상: https://www.dropbox.com/sh/79min9eqnva0cvi/AAAgTSx1WV64D4TdW5H2i-j3a?dl=0
무당벌레와 이를 모방한 전개형 날개
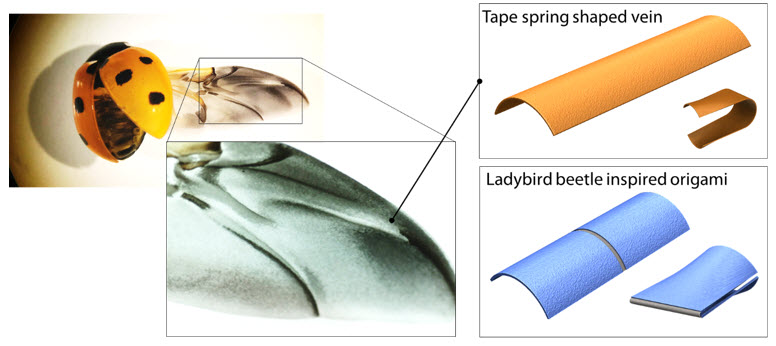
무당벌레 날개의 시맥을 모사한 종이접기 기반 구조

전개형 날개의 펴진 모습과 접힌 모습. 날개는 1/8의 면적에 접힐 수 있다.

전개형 날개를 활용한 점핑-글라이딩 복합거동 로봇의 운동 궤적
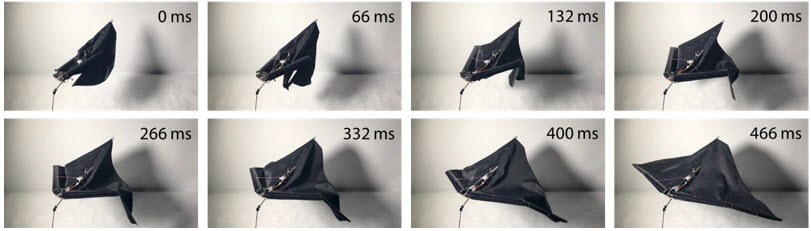
전개형 날개의 전개 순서
조규진 교수는 누구?
인간중심소프트로봇기술연구센터(ERC)장. 2014년 소프트로봇과 생체모사로봇 설계 분야 성과를 인정받아 '국제로봇학회 젊은 연구자상(IEEE RAS Early Career)'을 받았다. 2015년 〈사이언스〉 저널에 실린 '소금쟁이 로봇'을 개발했다. 2016년에는 전미과학진흥협회(AAAS) 연례대회에서 장애인의 일상생활을 돕는 장갑형 소프트로봇 '엑소 글로브 폴리(Exo-Glove Poly)'를 공개해 화제를 모았다. 같은 해 4월, 이탈리아 피사에서 세계 최초로 열린 ‘소프트로봇챌린지’에서 ‘스누맥스’로 우승했다. 소프트로봇챌린지에서 우승한 종이접기 원리를 이용한 가변형 바퀴를 고도화하여 실제 차량 무게를 견디면서 변신이 가능한 타이어를 개발하여 한국타이어 광고에 활용되었다. 종이접기 원리를 이용한 가제트팔과 유사한 드론용 로봇팔과 펠리컨 장어의 큰 변형 원리를 구현할 수 있는 소프트 로봇을 개발하여 사이언스 로보틱스 표지 논문으로 게재하는 등 소프트 로봇과 생체모방 로봇 분야에서 활발한 연구를 하고 있다.